【今月のまめ知識 第76回】 ロボット動作時の把持ワークに掛かる荷重
公開日時:2019/07/31
とあるのんきな朝のひと時
あるる「博士ぇ〜、最近のロボットってスゴいんですね!」
博士「おはようあるる。何はさておき、朝は挨拶からじゃぞ」
あるる「あ、ごめんなさい。博士、おはようございます」
博士「おはよう。で、ロボットがどうしたんじゃ?」
あるる「もう、すごいんですよ、ロボット! しかも大学生たちが作るロボットが
めちゃめちゃすごいんです\(^o^)/」
博士「大学対抗のロボットコンテストのことかの?」
あるる「そうそう、それです! おじいちゃんと一緒に見ていて、もう応援しまくりですよ」
博士「おお、それならわしも見たぞ。今年はドラマがあったのぅ」
あるる「ロボットって、いろんな要素がバランス良く作用しないと、うまく動かないんですね。
奥が深いなぁ〜」
博士「そうなんじゃよ!いいところに気がついたの、偉いぞ、あるる。ロボットの性能はもとより、
ロボットがどういう動きをするかを研究することが大事なんじゃぞ」
あるる「なるほど〜、奥が深いんですね・・・」
博士「ところであるるよ、前回話した「遠心力」は覚えているかの?」
あるる「もちろんです。さすがにそんなに忘れっぽくはありませんよ」
博士「その遠心力とロボットの動き、実に深い関係があるんじゃ。知りたいか?知りたいじゃろ?」
あるる「もちろんですっ!ぜひ、ぜひっ!」
博士「そ、そうか? では早速・・・(今日はやけに積極的じゃのう・・・)」
前回は「遠心力」に関してお話ししました。
垂直多関節ロボットやスカラロボットなど極座標系のロボットでは、直線補間をしないで円弧動作をさせた場合には
把持しているワークに遠心力が掛かります。
また、進行方向に対しては慣性力が掛かりますから、それが組み合わさってかかることになります。
今回は直線動作、円弧動作それぞれの場合の”力のかかり方”を考えてみます。
モデルとして、アーム半径500㎜で500㎜の距離を0.5秒で動作するロボットで
把持ワークの質量を0.2kgとして、慣性力、遠心力を算出してみます。
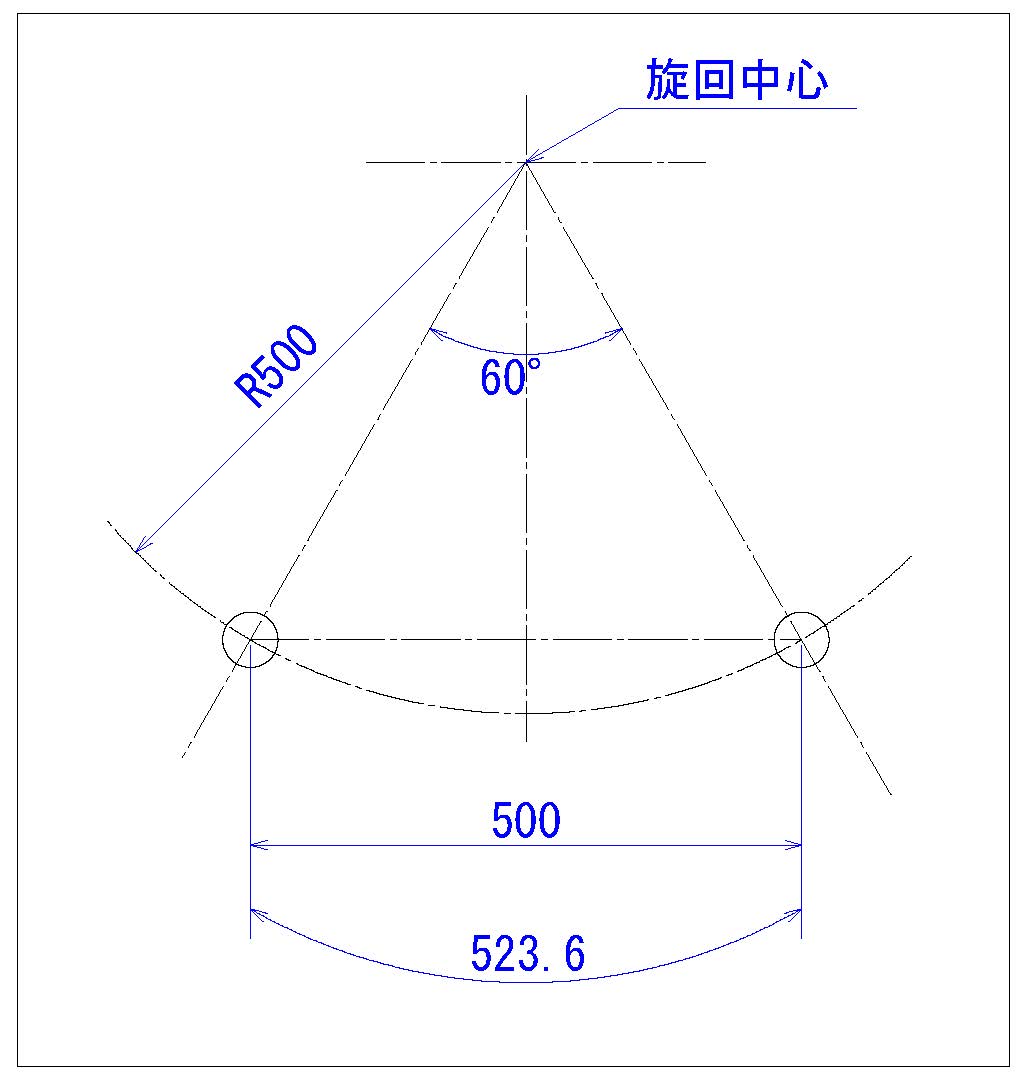 図-1
図-1
この時のロボットの動作を正弦波形と想定します。
そして最高速度を2m/sec、動作時間を0.5secとすると、以下の波形が得られます。
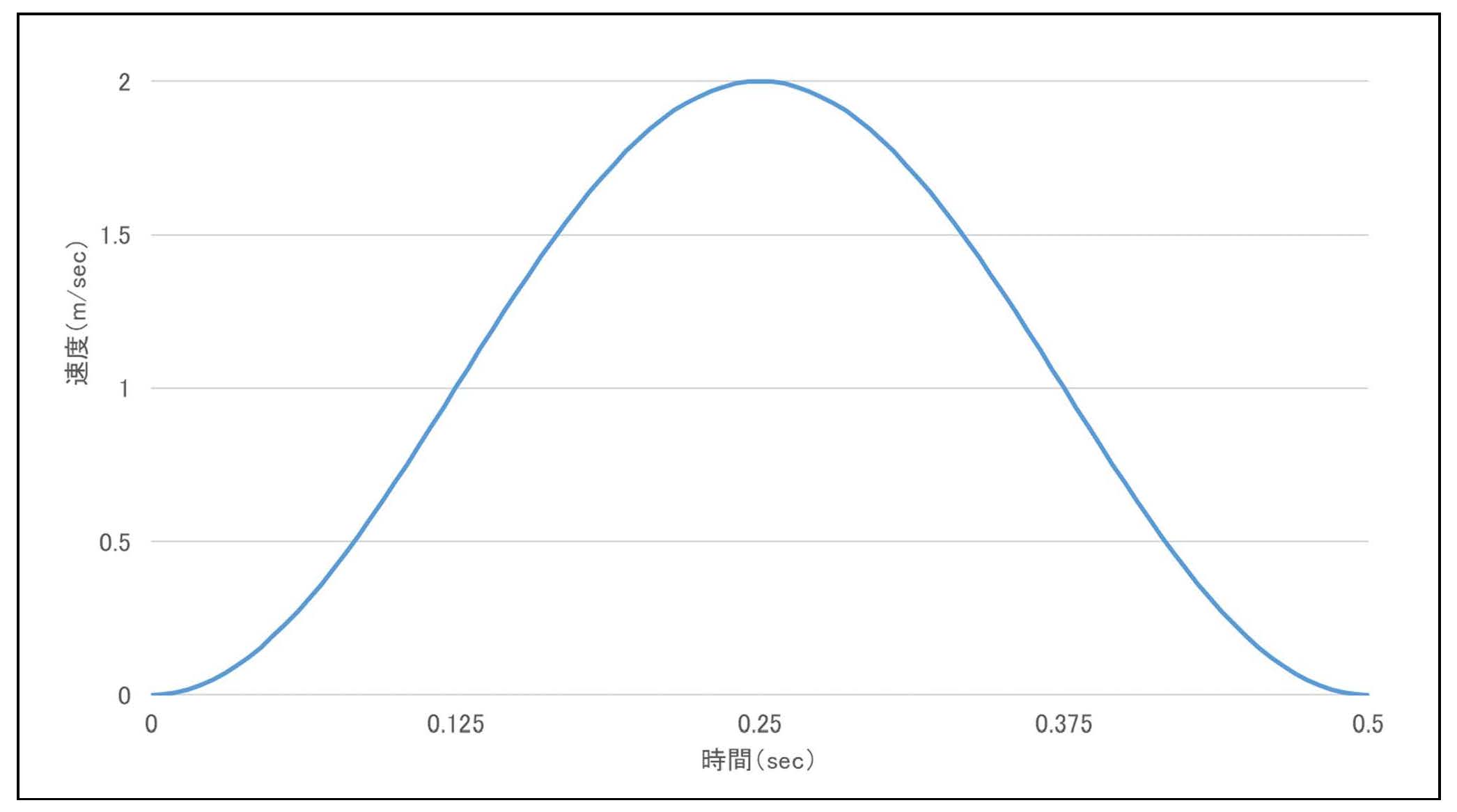
グラフ-1
ここで移動距離ですが、これでちょうど500mmとなります。
----------------------------------------------------------------------------------
上記の波形は通常のsinカーブに対して
としています。
縦軸は1を加えて-1を0として最大値を2としています。
この1サイクルなので

これを解くと2πとなり、縦軸振れ幅で2m/sec、横軸は2πを0.5secとしてスケールに合わせて換算すると0.5mとなります。
または正弦波の定積分公式を利用して図形的な解釈も可能です。

グラフ-2
----------------------------------------------------------------------------------
1. 直線動作の場合
最大加速度ですが、0.125secの位置であり、これは正弦波では0radの位置に相当し
sinの微分はcosになるので、その値は1となります。
これも横軸2πを0.5secとしているので、換算すると

と、算出されます。
つまり、直線補間した場合には
0.125secの位置で12.57m/s2、
0.375secの位置で-12.57m/s2
の加速度が掛かっていることになります。
そしてこの発生位置は

であり、これを解くと、0.57となり
ストローク全体での比率で
となり始点、終点からそれぞれ45.3mmです。
把持しているワークの質量が0.2kgであれば、移動方向にかかる荷重は以下になります。

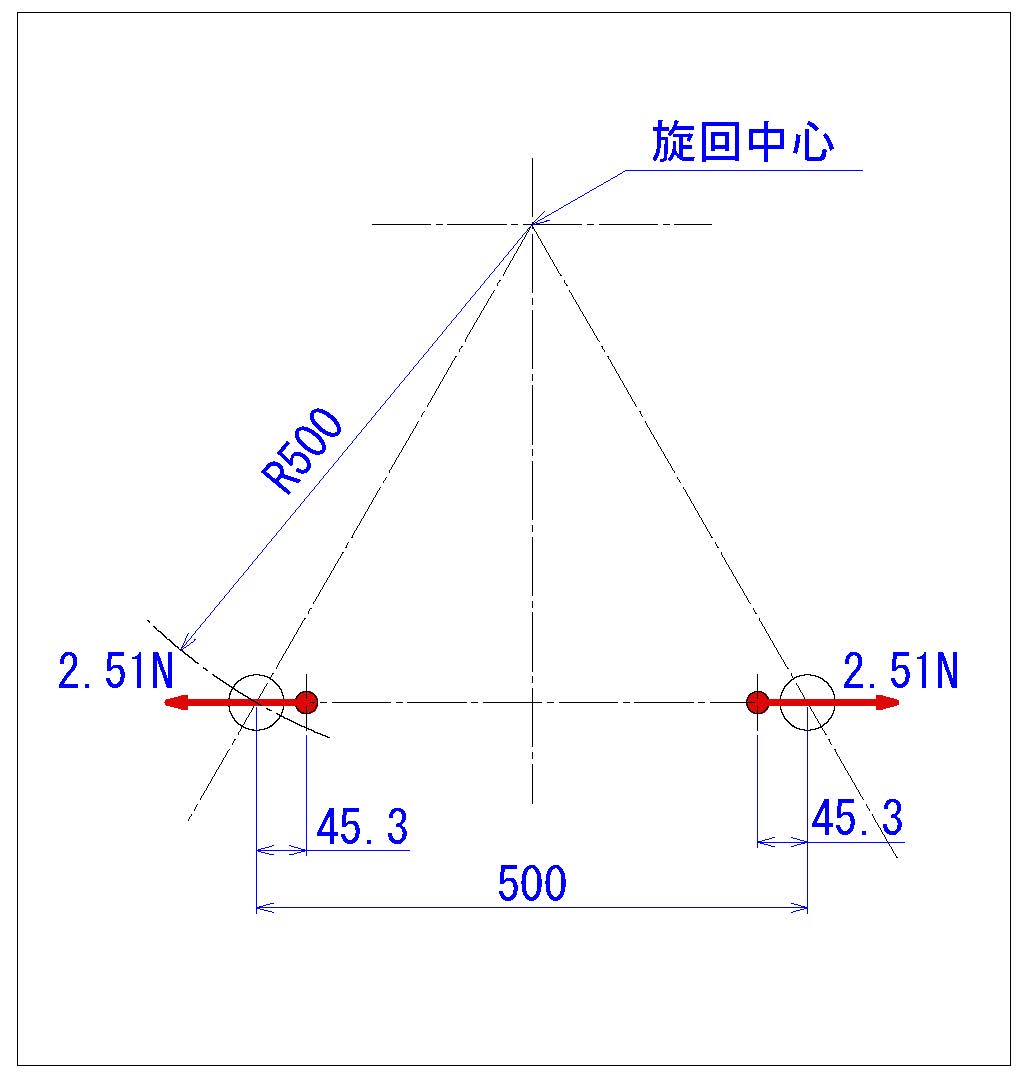
図-2
2.円弧動作の場合
弧長は523.6mmとなるため、同じ0.5secでの動作だとその比率分、速度が速くなります。
(J1軸の角速度は変わりません)
最高速度は

この時の角速度では

となり、一般定なロボットで余裕のある値です。
① 最高速度の位置
まず遠心力を計算してみます。
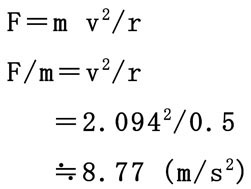
把持しているワークの質量が0.2kgであれば、
ワークから見た遠心力は以下になります。

② 進行方向の加速度が最大となる位置(0.125secと0.375sec)
速度は最高速のちょうど1/2であるため遠心力は
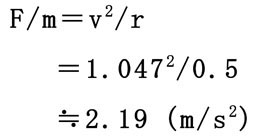
把持しているワークの質量が0.2kgであれば
ワークから見た遠心力は以下になります。

この位置での進行方向慣性力は速度比と同比なので、
直線運動の場合の慣性力にこの比を乗じ

そしてこの発生位置は、直線動作時同様で
ストロークの9.07%の位置であり
ストローク角は60°なので

となり始点、終点からそれぞれ5.44°です。
把持しているワークの質量が0.2kgであれば、移動方向にかかる荷重は以下になります。

③ 中間位置
これに加えてもう1点、慣性力と遠心力の両方がある程度掛かっている点として、ストロークの3/8の位置(0.1875sec)も算出してみましょう。
この位置は通常の正弦波形でX軸がπ/4(45°)の位置であり

そのsin値をY軸のスケールで換算すると速度が求まります。

この点での遠心力は

把持しているワークの質量が0.2kgであれば、ワークから見た遠心力は以下になります。

次に慣性力です。加速度はsinの微分でcosですが、45°なので同値となり、先の最大加速度にこれを乗じた値となるので

となります。
そしてこの発生位置は
であり、これを解くと、1.65となり
ストローク全体での比率で

ストローク角は60°なので

となり始点、終点からそれぞれ15.78°です。
把持しているワークの質量が0.2kgであれば、移動方向にかかる荷重は以下になります。

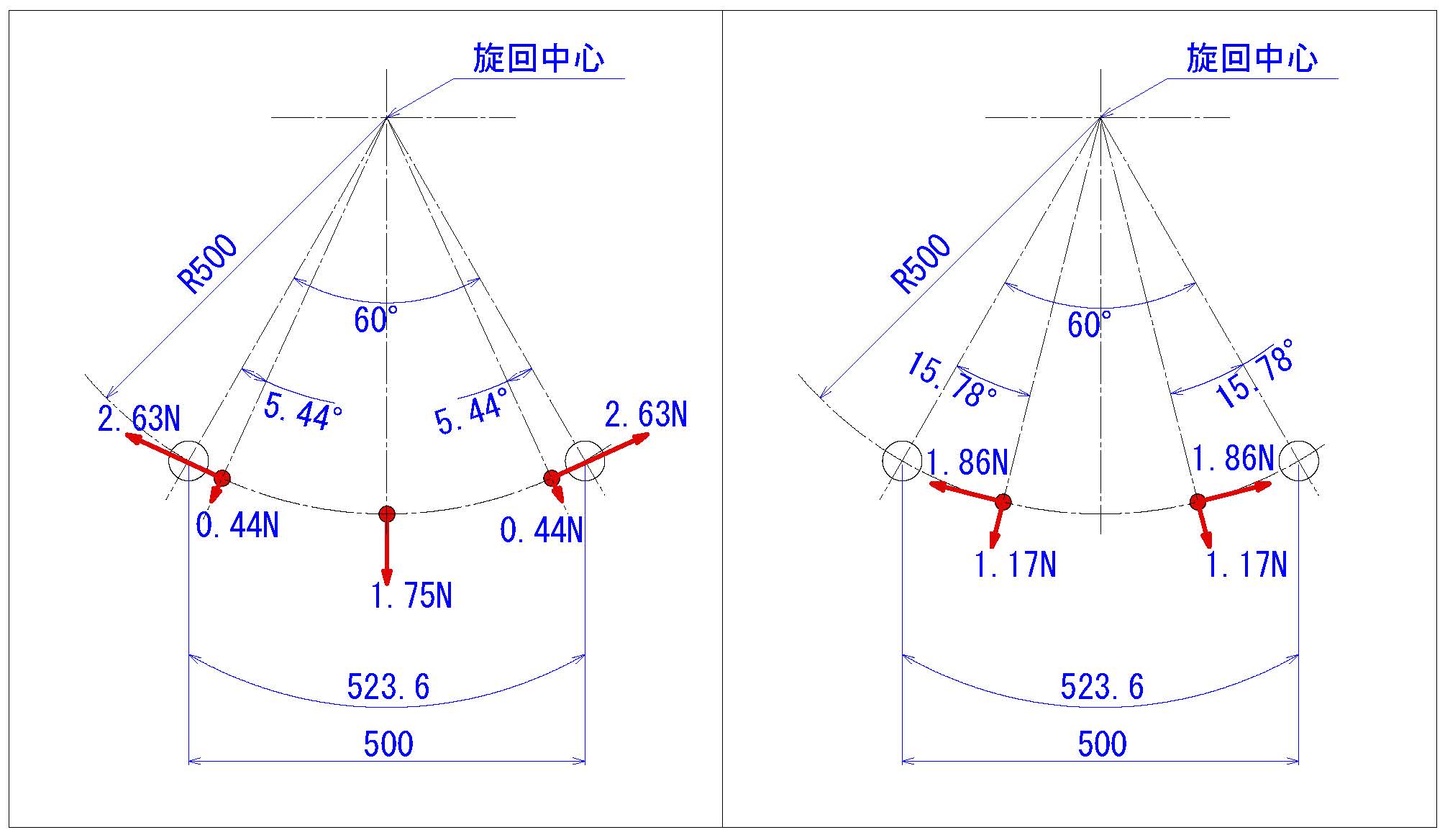
図-3
直線動作の場合は、円弧動作に比べて遠心力が発生しないことに加え、進行方向の慣性力も少し小さくなっています。
しかし、垂直多関節ロボットの場合、直線動作ではJ2軸が動作するため、ロボットの前後方向に掛かるモーメントが大きくなり、架台に負担を与えることになります。
博士「どうじゃ、あるる。ロボットと遠心力の関係は、腑に落ちたかの?」
あるる「う〜ん・・・計算式は難しすぎて、なにがなにやらさっぱり・・・でも、〝力のかかり方が大事〟いうことだけはわかりました!」
博士「そうじゃな、あるるにはちょっと難しすぎたかの〜。計算はおいおい覚えておけばよい。今は大事なことが大事だということがわかれば良しじゃ」
あるる「あー、なんか、数字をいっぱい見たらお腹が空いちゃいましたよ。今日は「早お昼」にしましょうよ〜」
博士「数字を見ただけでお腹が空くとは! あるるらしいというか、先が思いやられるというか・・・」
あるる「博士ぇ〜、早く〜。お弁当買いに行きますよ!」
博士「この行動力が、学びに結びつけば言うことなしなんじゃが・・・」